具身机器人中情感认知与智能交互研究
围绕具身智能中人形机器人的情感认知与交互,本项目致力于构建“感知-认知-交互”自然交互环路,推动智能机器人向更具自然性、贴合场景需求、兼具实用价值与人文关怀的方向发展。
情感的感知与自然表达是具身机器人应用的关键步骤
随着人形机器人技术的快速迭代,其应用场景正从特定工业场景向养老陪护、教育辅助、公共服务等多元领域延伸,核心需求从 “功能执行” 转向 “情感共鸣”。本项目围绕具身智能的情感交互技术展开系统研究,旨在为不同领域人群提供自然且多样化的情感交互。研究内容包括三个方面:
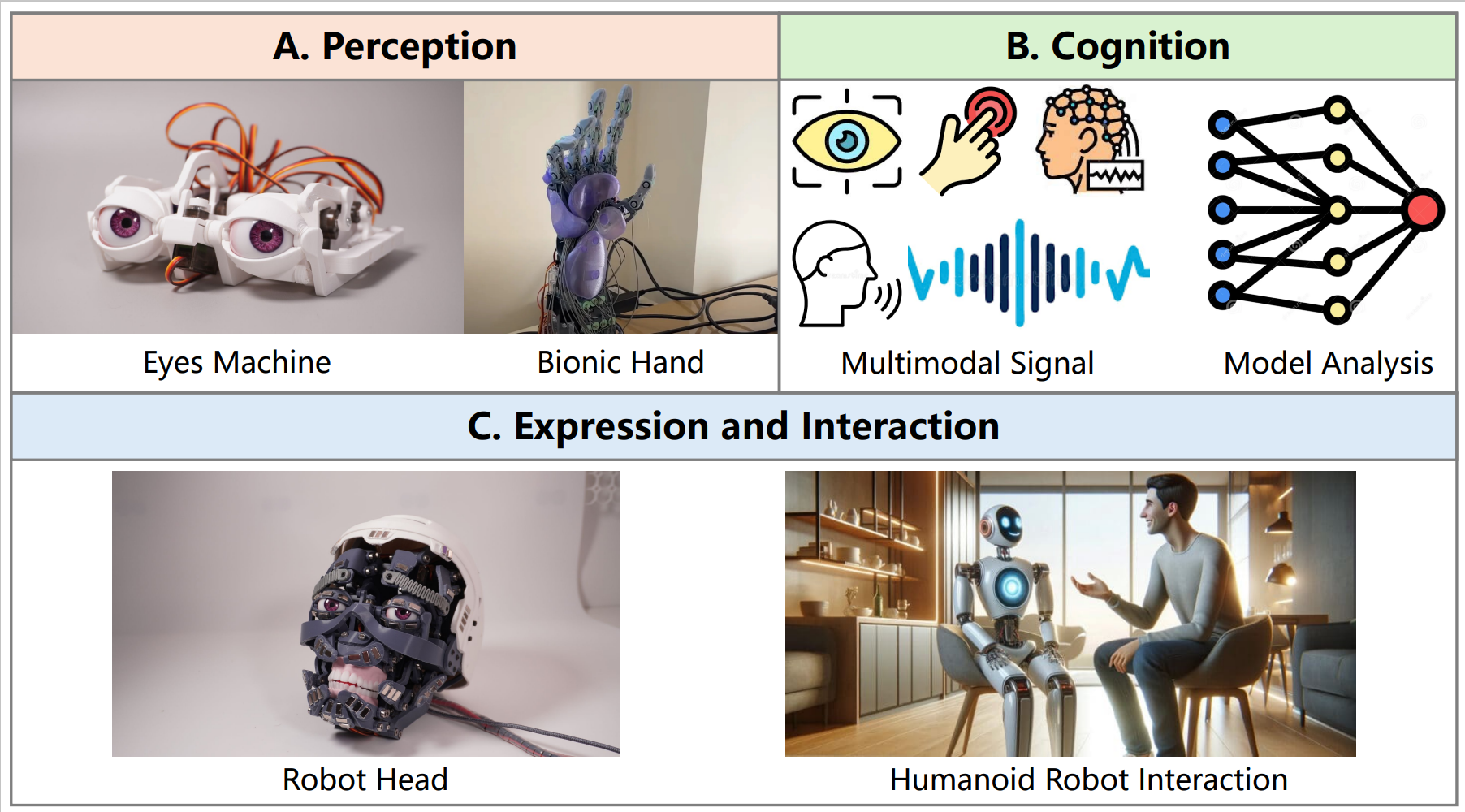
一、情感交互多模态数据库:构建了面向多元场景的情感交互多模态数据库,核心含自建的 Robot-Expr(机器人头部 3D 表情数据集)、Hand-Emo(灵巧手情感化动作数据集)、Human-Robot-Int(机器人交互数据集),覆盖养老、教育、公共服务等典型场景,为机器人数据感知、意图理解与自然表达系统研发提供数据支撑。
二、感知与表达模型:针对机器人情感交互中的多模态信息融合、场景适配、交互自然性等关键问题,提出EmInt融合框架(实现面部、手部、肢体动作的情感语义对齐)、场景自适应范式及情感表达生成模型,形成 “模态感知→意图理解→情感表达” 闭环系统,为机器人情感交互提供理论与技术支撑。
三、实际应用:团队在机器人情感交互领域有多项落地成果:与四川具身人形机器人公司合作推进机器人的情绪识别,将相关技术迁移至儿童陪伴机器人研发中,服务于儿童情感陪护等,为具身智能落地提供解决方案。
本研究团队在具身智能与情感计算交叉领域具有深厚积累,负责人任福继教授为全球情感计算领域代表性学者,团队拥有多源情感数据库、智能感知技术与机器人交互平台,并与长虹集团共建联合实验室,推动研究成果在智慧健康与智能陪护中落地。
情感认知与调节数据库
本项目构建了面向驾驶场景的情感认知与调节多模态数据库,核心数据由自主采集的Synthetic, R³-Ftg 与 Be 数据集构成,同步整合主流公开数据库的访问接口,便于研究者对比与扩展。
自建数据库:
外部资源集成:
为便于研究者开展横向对比与基准测试,本平台提供对以下公开数据库的导航链接及简要介绍:
本数据库以真实驾驶场景下的多模态情绪数据为核心,为车内乘员情绪感知与智能干预系统研发提供可靠数据支撑。
识别与调节模型
本研究围绕面部表情识别(FER)中的核心挑战——标签噪声与数据分布不均衡问题,提出了一系列关键技术创新,构建了兼具鲁棒性与泛化能力的智能情感识别框架。
核心技术成果如下:
ReSup:可靠标签噪声抑制框架
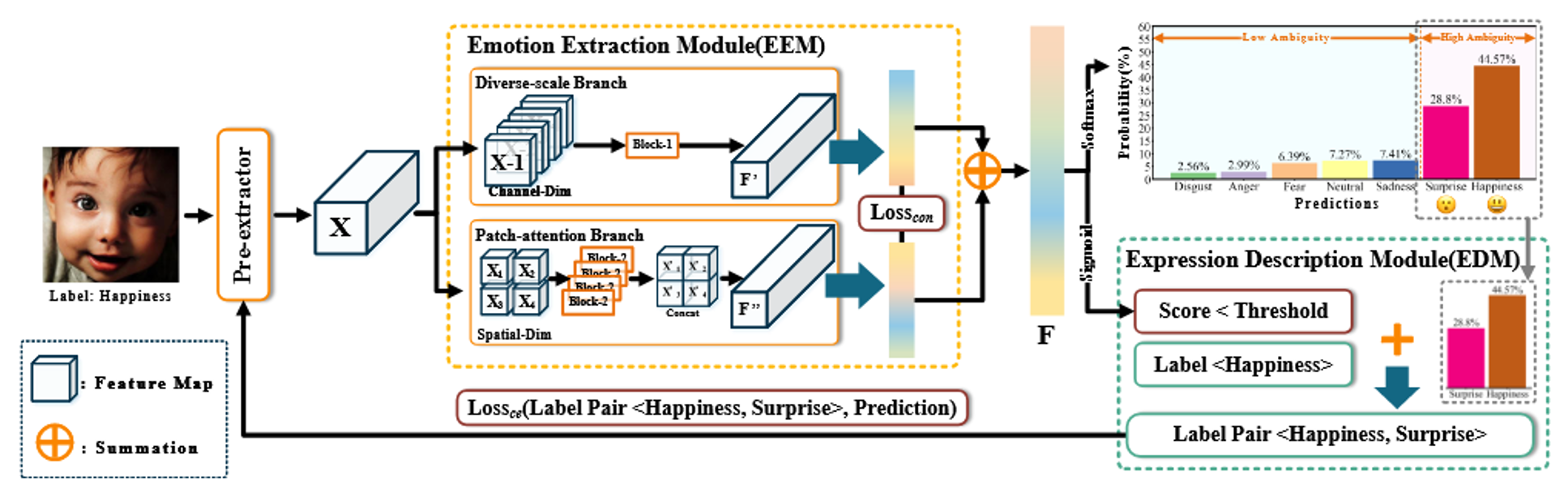
针对真实场景下因主观标注导致的标签噪声问题,提出 ReSup 方法。不同于传统直接判断标签是否含噪的方式,ReSup通过建模预测结果与目标标签之间的差异分布,同步学习噪声与干净样本的联合分布,提升噪声判定的可靠性。进一步引入双网络协同决策机制,利用“双网共错概率低”的特性,通过决策交换与一致性增强,有效减少误判带来的训练干扰,显著提升模型在含噪数据下的学习效率与稳定性。
Co-dance with Ambiguity:面向模糊性的鲁棒识别范式
从“与模糊性共舞”的视角出发,系统性地将标签不确定性建模为可优化的学习过程。ReSup方法作为其核心实现,不仅抑制噪声影响,更通过动态调整样本权重,使模型在复杂、模糊的驾驶环境中具备更强的鲁棒性与适应能力。
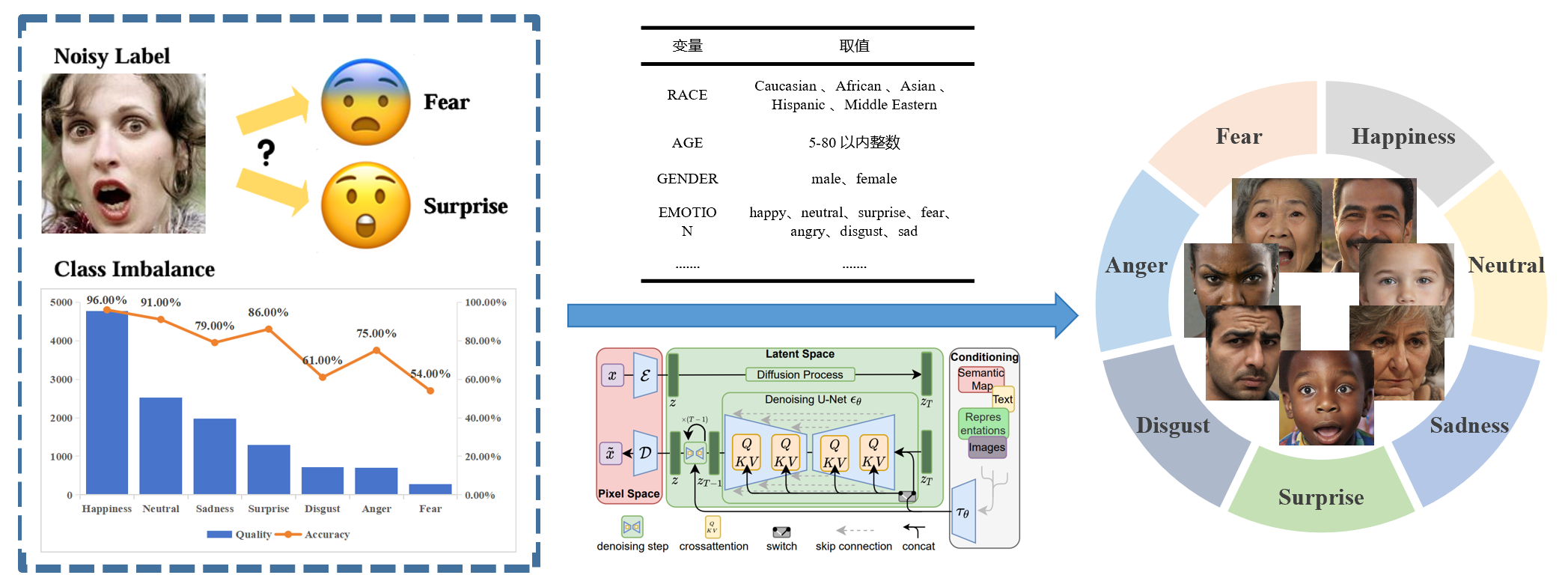
基础模型构建:合成数据驱动的通用表达识别
针对真实数据集中存在的类别不平衡(如“恐惧”、“厌恶”样本稀少)问题,提出基于人工可控方式生成大规模标准化面部表情数据集的方案。利用此类高质量、无噪声、均衡分布的合成数据进行无监督预训练,构建通用的面部表情基础模型。该模型可通过微调高效适配于智能座舱情绪识别、人机交互情感反馈等下游任务,大幅提升模型的泛化能力与实际落地价值。
本模块研究成果形成了“噪声抑制 → 模型鲁棒 → 基础模型泛化”的技术闭环,为高精度、高可靠性表情识别提供了坚实的理论与技术支撑。
查看模型详情
实际应用
团队在具身机器人领域有多项实际运用:研发仿生机器人头,完成技术迁移与升级,构建“精准感知—智能反馈”交互闭环,支持实时表情感知与表达;同时研发情绪识别系统,支持视觉与文本多模态分析,为相关研究提供高效工具。
查看应用案例